对于多终端 IK 问题,游戏中一般采用 JacobianIK, FABRIK, PBDIK, EXPBDIK,UE 4.26 全身 IK 采用 JacobianIK,UE 5 中采用 PBDIK, 因此有必要了解一下 JacobianIK。为说明 JacobianIK,先从解析法的角度出发计算 IK, 然后再从数值角度求解。
解析法求 IK
给出终端控制器位置,构建终端与关节角度关系,直接求解,这就是解析法,如下图所示
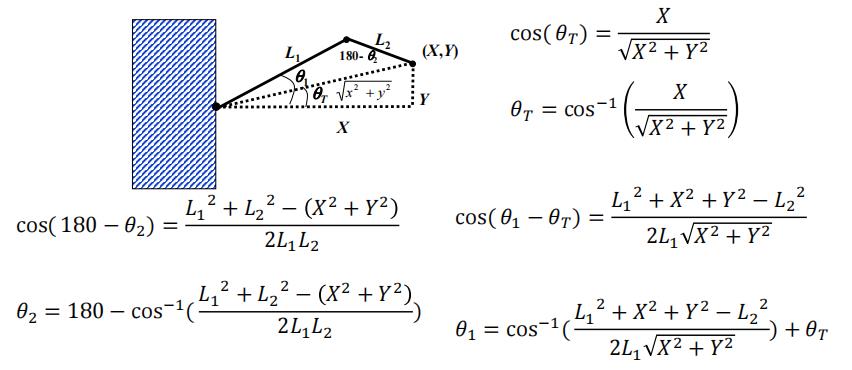
但当关节链比较复杂时,解析解可能不存在,这时就可以采用数值法求解了。
雅克比矩阵数值法求 IK
如果能构建出终端控制器的位置与各个关节旋转角度的关系,即 f(θ1,θ2,…,θn)=E(x,y,z), 那么当部分关节发生旋转变化时就能得到终端控制器的变化,这就是雅克比矩阵的作用。
雅克比矩阵:将关节空间的速度(一般是角速度)转换到笛卡尔空间下的速度(一般是线速度)
E(t)=f(θ(t))V=Jθ˙
逆向雅克比矩阵:笛卡尔空间下的速度转换到关节空间的速度
θ˙=J−1Vdθ=J−1dE
假定现在只有一个末端控制器 E, 那么此时的雅克比矩阵是 3×N 矩阵, N 是自由度数目,下面给出一个案列。
雅克比矩阵示例
二维空间下,终端自由度为 2 的关节链,如下图所示
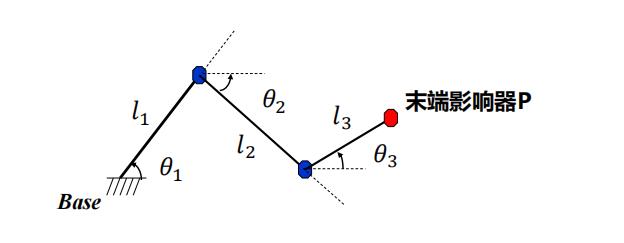
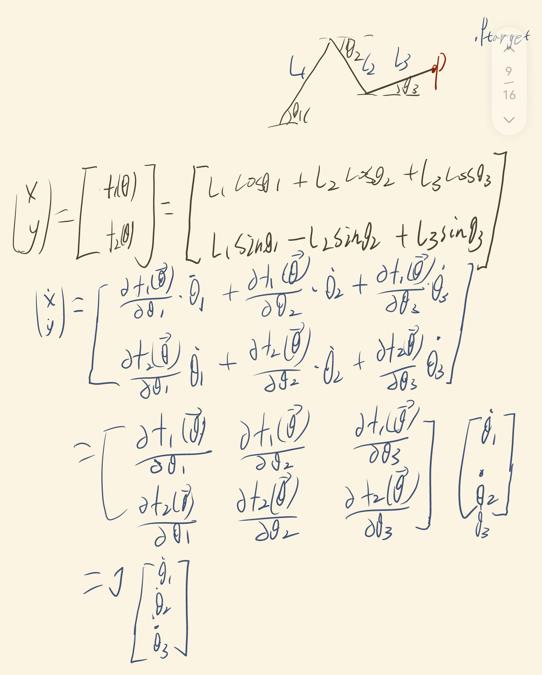
上图有终端坐标 (x,y) 与各个关节角度的关系

然后求导,得到终端线速度与关节角速度关系式,而它们的映射就是雅克比矩阵,注意
(x,y)其实是(x(t),y(t)),f(θ)是f(θ(t)), 然后对 t 求导
修改雅克比矩阵形式
注意到上面雅克比矩阵各个元素使用的是 ∂θ1∂f(θ1θ2…θn) 表示,游戏中不会出现 θ,有必要换个形式表示,游戏里最好的自然是向量了。
考虑刚体上两点,i, j, 它们的角速度分别为 wi, wj, 线速度分别为 vi,vj, i 到 j 向量为 pij, 有
vj=vi+wi×(pj−pi)
现在考虑终端 E 与关节 i , 当关节 i 旋转时它是没有线速度的vi=0,又因为角速度 wi=θ˙Wi, Wi表示旋转轴, 那么有
E=vi+wi×(pE−pi)=[Wi×(pE−pi)]θ˙, 这样也得到了一个将关节角速度转换到终端线速度的表达式,构建出的矩阵就是雅克比矩阵的另一种形式。
但是,这不表明两个矩阵各元素一一对应,现在用另一种方法直接推导原雅克比矩阵元素的另一种形式。
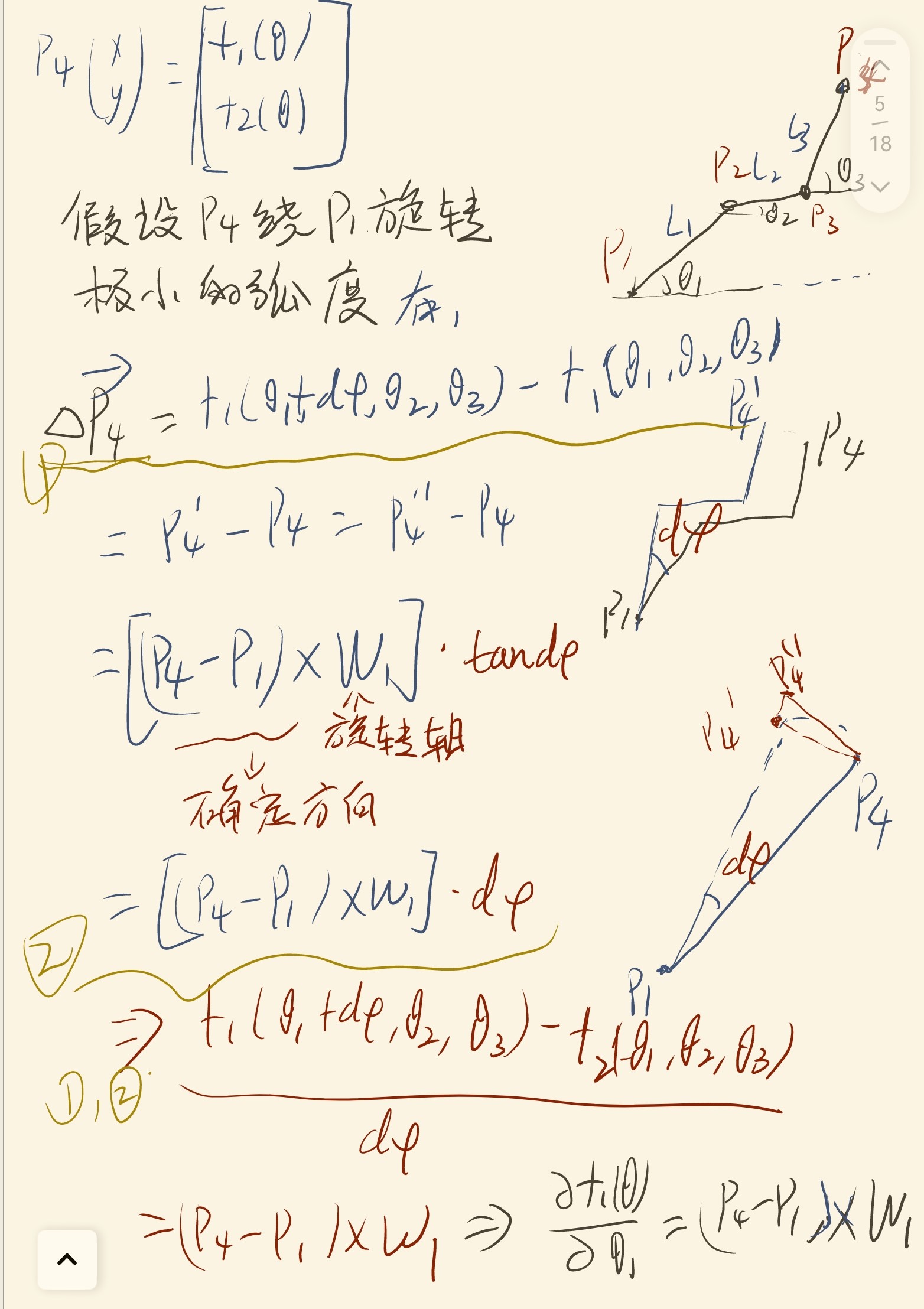
雅克比矩阵元素另一种形式
注意等价无穷小 tanθ=θ,p4 就是终端
雅克比矩阵最后的形式
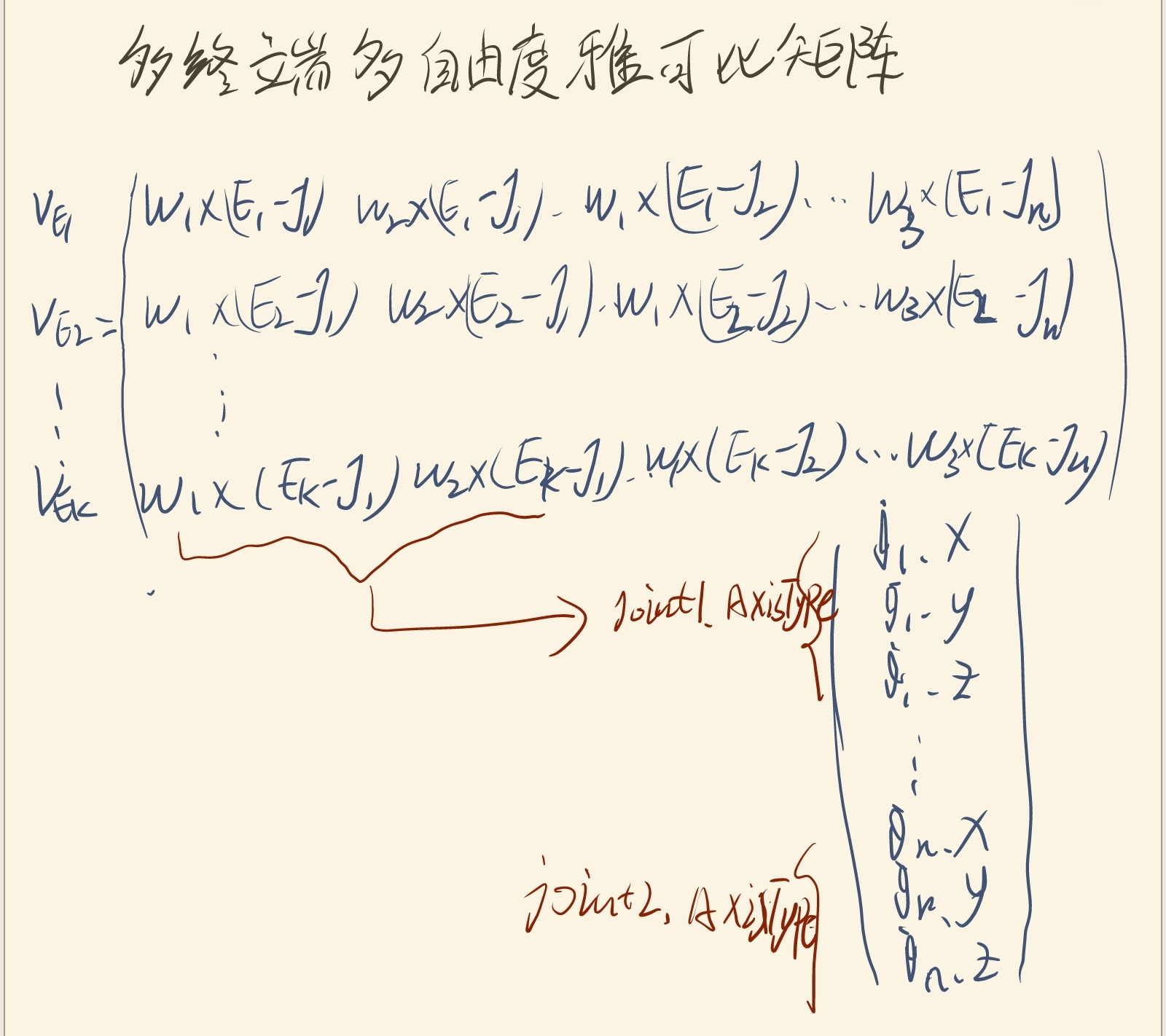
考虑多终端,多自由度,雅克比矩阵最终形式如下,w1,w2,w3 表示 x,y,z 三个旋转轴(1,0,0),(0,1,0),(0,0,1),如果某个关节 Ji x 轴不能旋转,就让包含 w1×(E−Ji) 的元素全部为 0。
使用雅克比矩阵求 IK
上面给出了终端 E 的线速度与关节角速度的关系式 V=Jθθθ˙, 如果终端单位时间位移 V,而关节旋转 θ˙θ˙θ˙ 恰好导致终端单位时间位移 V,这就是为什么求出 θ˙θ˙θ˙ 再作用到关节上能让终端到达目标位置,现在的问题在于上面的公式不能直接求 θθθ, 是否要直接用 θ˙θ˙θ˙=J−1V 求解?
使用雅克比矩阵的转置
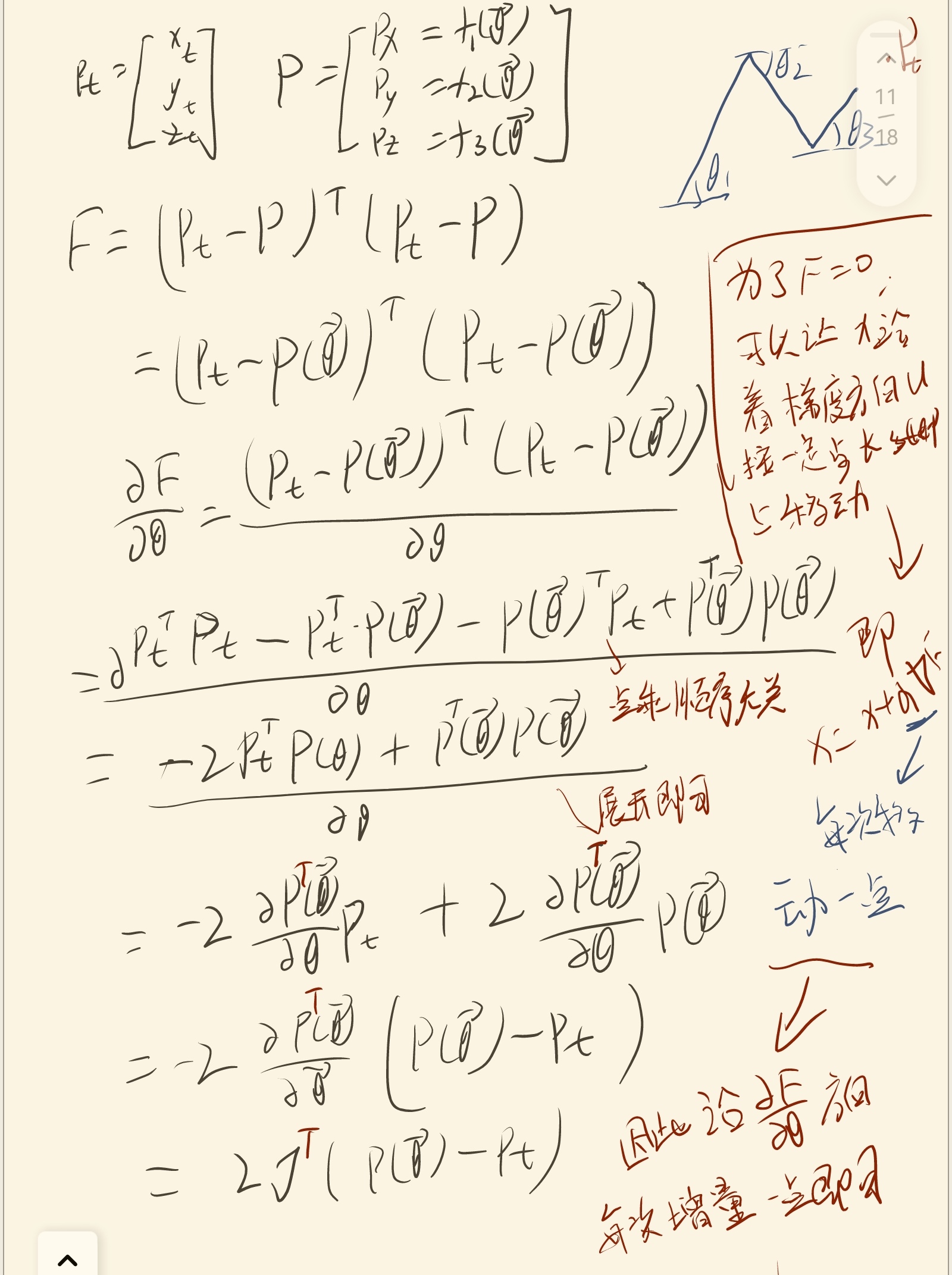
上面构建雅克比矩阵采是从物理的角度推导出来的,现在换数学角度推导,为使得终端距离目标位置最近,构建如下误差函数(误差距离的模)
F=21(Etarget−f(θθθ))T(Etarget−f(θθθ)
为快速到达 F=0,那就沿梯度方向,因此对 F 求导有, 注意向量对向量的求导就是雅克比矩阵,得到的形式和上面的相同。
无论从数学的角度看,还是物理的角度看都能得到一个雅克比矩阵,而且上述问题就是最小二乘问题,并且伪逆也和最小二乘有关系。
最终,如果每次迭代让关节旋转 JTV 可以让 E 逐步接近目标位置
使用伪逆
当雅克比矩阵 J 不是方阵时,对 V=Jθθθ˙ 两边同左乘 JT 有
JTV=JTJθθθ˙
当 J 列满秩时, JTJ 可逆
(JTJ)−1JTV=(JTJ)−1JTJθθθ˙=θθθ˙
伪逆的物理意义
下面从优化角度说明伪逆的物理意义
现有目标函数 F(Δθθθ)=21ΔθθθTΔθθθ
求在条件 Δp=JΔθθθ (V=Jθθθ˙换个形式) 下什么时候取得最小值
引入拉格朗日常数构建拉格朗日函数
L(Δθθθ,λ)=21ΔθθθTΔθθθ+λ(Δp−JΔθθθ), 求对 Δθθθ, λ 的偏导,并使其为 0,
得到
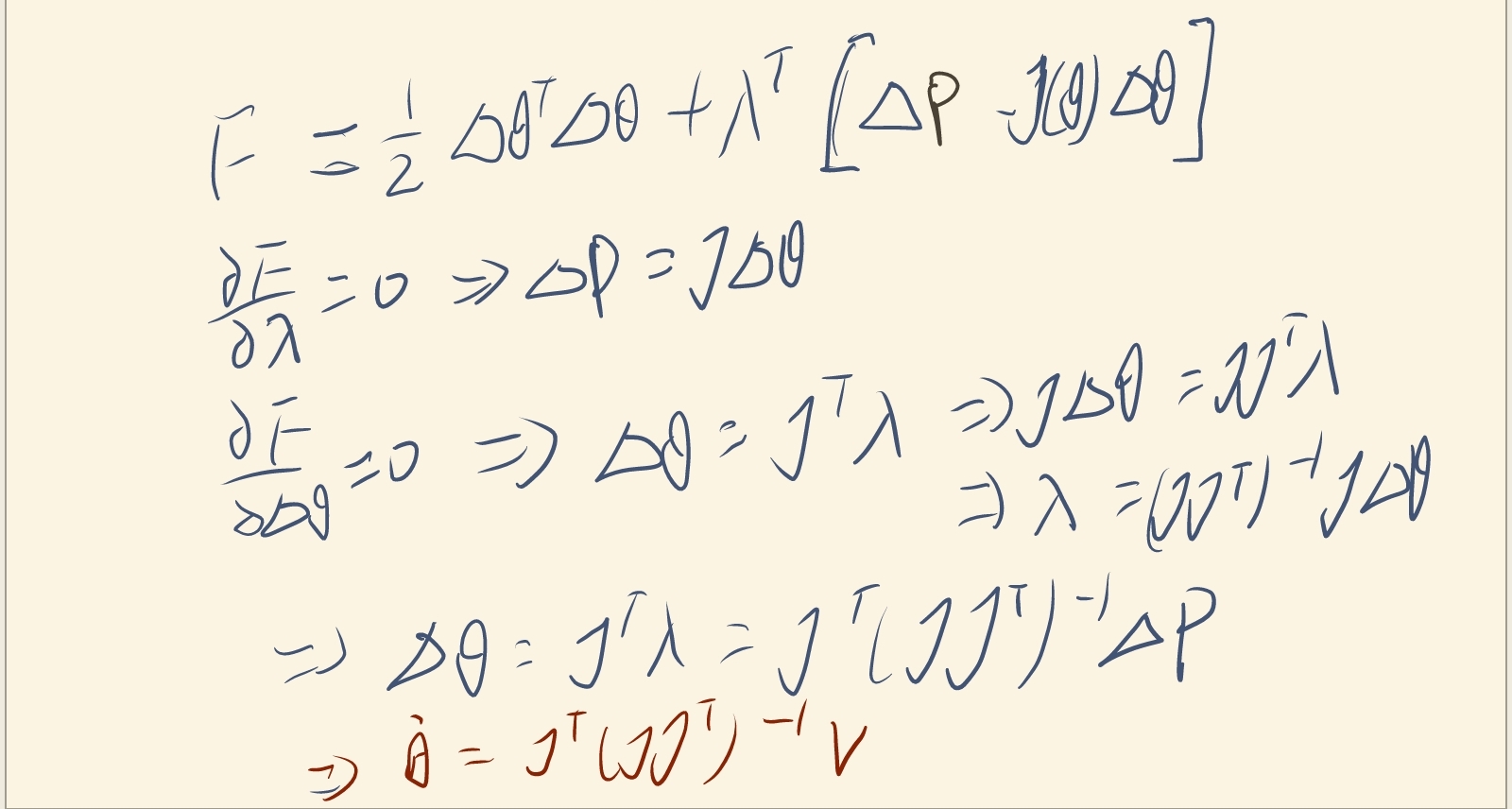
使用雅克比矩阵求解求出的是许多解中的一个,而目标函数 F(Δθθθ)=21ΔθθθTΔθθθ 保证了当前的解是关节角速度变化最小的解。
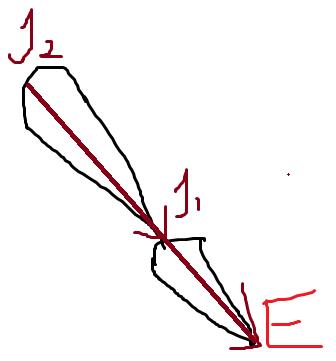
最后同样的求出 θθθ˙ 作用到各个关节上即可完成雅克比 IK,现在的问题在于什么时候,J 会是非列满秩的?注意到雅克比矩阵形式,如果只有两个关节,只考虑旋转轴 x,其形式如下
⎝⎛((1,0,0)×(E1−J1)).x((1,0,0)×(E1−J1)).y((1,0,0)×(E1−J1)).z((1,0,0)×(E1−J2)).x((1,0,0)×(E1−J2)).y((1,0,0)×(E1−J2)).z⎠⎞
显然当 E1−J1 与 E1−J2 同方向时不满足列满秩条件,此时对应的情况是关节连杆平行,或者连杆完全展平如下图所示
引入阻尼
考虑当 J 不是列满秩矩阵时,θθθ˙=JT(JJT)−1V 无法求解,那么引入一项伪逆敏感程度的附加项 λI 将公式修改为
θθθ˙=JT(JJT+λI)−1V ,目的就是尽量要让逆存在。
引入其它控制项
显然还可以引入其它控制项让关节运动看起来更加自然,比如关节 i 朝特定角度偏移
F(θi)=αi(θi−θtargeti)
θi: i 关节当前角度
αi: i 关节增益(相当于一个权重,增益越大刚性越强越快逼近目标角度,增益为 0 时控制项失效)
θtargeti: 当前关节目标角度
显然,控制项可以自定义,然后按照上面的条件极值方法求解即可,就看怎么设计让变化更加自然吧。
使用扩展雅克比矩阵
相关论文 Kinematic programming alternatives for redundant manipulator 下载不到,似乎是在原雅克比矩阵基础上扩展行,然后求解,而且雅克比矩阵扩展方案不止这一个,就没看了。
雅克比矩阵方案比较
直接使用转置
优点:简单,数值稳定,不用求逆
缺点:收敛没有那么快,没有控制项
使用伪逆
优点:关节旋转角度最小
缺点:有奇异值问题,要求逆,没有控制项
伪逆并引入阻尼等控制项:
优点:关节旋转角度最小,可以显式的控制关节
缺点:引入了额外的计算
——————————————————————————————————————————
总结
雅克比 IK 做全身 IK 是必然可行的,无论是多骨骼链多终端还是单骨骼链多终端, Jacobian IK 都能求解,而且可以自定义添加控制项让关节运动更加自然。至于求解,通常要么用转置取代逆矩阵,要么求伪逆,一旦要求伪逆就得考虑一下性能开销了,LU, SVD, QR 都有不小的计算开销。另外,雅克比 IK 使用了梯度下降的方法,所以必然存在迭代步长,局部最优等问题。
参考
Introduction to Inverse Kinematics with Jacobian Transpose, Pseudoinverse and Damped Least Squares methods
Inverse Kinematics Techniques in Computer Graphics_ A Survey
Lecture 16_ Kinematics Transformation_ Part 2
Inverse Kinematics (part 2)
