使用雅克比 IK 需要对矩阵求伪逆,性能开销较大,考虑到 PBD 也能完成关节约束,并且不需要求矩阵伪逆,其开销应该会低于 JacobianIK, 因此可以考虑使用 PBD 完成 FullBodyIK。下面先介绍 PBD 算法。
PBD 说明
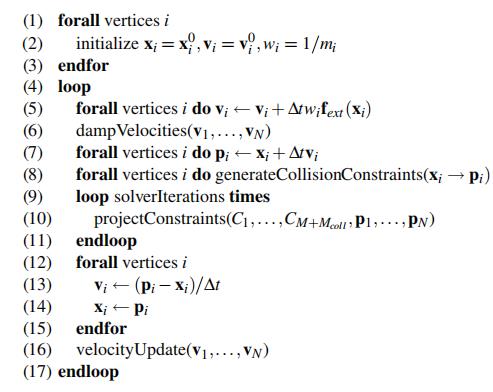
PBD 算法采用”预测校正“的思路完成模拟,先完成系统在外部作用力,阻尼的计算,得到粒子初步的位置,然后再使用系统内部约束完成位置”校正“。下面直接给出算法步骤
1 初始化粒子数据,质量,速度,起始位置等
2 计算外力对系统的影响
3 计算阻尼对速度的影响
4 依据当前计算出的速度更新粒子预测位置 p
5 生成碰撞约束
6 再考虑系统内部粒子间的约束,求解约束对预测位置 p 校正
7 使用校正位置更新粒子位置以及速度
8 考虑摩擦等因素再次更新粒子速度
从上述步骤来看, PBD 对各个约束分步求解,并且步骤 6 中采用了高斯赛德尔迭代法的思路,对于某一次迭代之前的方程求解会影响到后续方程求解,这样可以加快收敛(对比雅克比迭代)。在这里就是某次迭代中,对某粒子的修正会直接代入下一个粒子的校正求解。
PBD 原理
上面给出了 PBD 算法流程,下面说明算法原理,也就是如何"校正"预测位置。首先说明约束然后说明约束求解。
论文把约束分为等式约束与不等式约束两种
1 等式约束 C(x) = 0 如要求粒子间距离保持不变
2 不等式约束 C(x) >= 0, 如后续的碰撞约束
现在说明如何使让系统稳定下来,也就使用约束校正预测位置以保证约束关系仍然成立
约束求解
当完成外部力,阻尼等计算后,粒子间约束显然很难再满足,如距离约束。但如果强行修改粒子位置,使粒子仍满足约束关系是不够的,最重要的是系统内部约束求解后整个系统应该满足
1 动量守恒
2 角动量守恒
这是因为我们在预测位置时已经计算了外力对系统的影响,因此这里系统不存在外力,并且,当合外外力为 0 时动量守恒,当合外力力矩为 0 时角动量守恒。
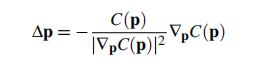
那么,现在要做的就是找到校正位移 ,有 ,且满足动量与角动量守恒。
对 做一阶泰勒展开将上述方程近似为
现在,PBD 算法做了一个关键性假设,将 限制在 上,以保证动量守恒,这里说下个人的理解。
为什么 限制在 上可以保证动量角动量守恒
论文中这部分说明如下,主要有两点内容,约束独立于刚体模态,约束梯度与刚体模态垂直。

约束独立于刚体模态
假定所有粒子质量相同,那么对于系统内部约束 C,由于 C 独立于刚体模态(就是刚体运动,即旋转与平移),因此平移旋转这些粒子不改变约束函数的值,也就是 的值。如长度约束 , 对 p_1, p_2 同时做相同的平移旋转变换不改变 $C(p_1,p_2)的值。另外,这里要注意的是举例说明用的是两个粒子的约束,而这里的内部约束 C 针对的是所有粒子 。
约束梯度与刚体模态垂直
旋转平移不改变约束函数的值,这说明约束梯度 与刚体运动方向垂直,这点可以从等值线上理解,当粒子沿 C=value 这条等值线运动时,约束函数的值不发生变化,此时,等值线某点切线方向就是运动方向,而梯度与切线垂直,如下图所示。同样的,这里的等值线指的是所有粒子组成的约束函数 ,这点可以参考深入浅出 Nvidia FleX】(1) Position Based Dynamics https://zhuanlan.zhihu.com/p/48737753 的说明。
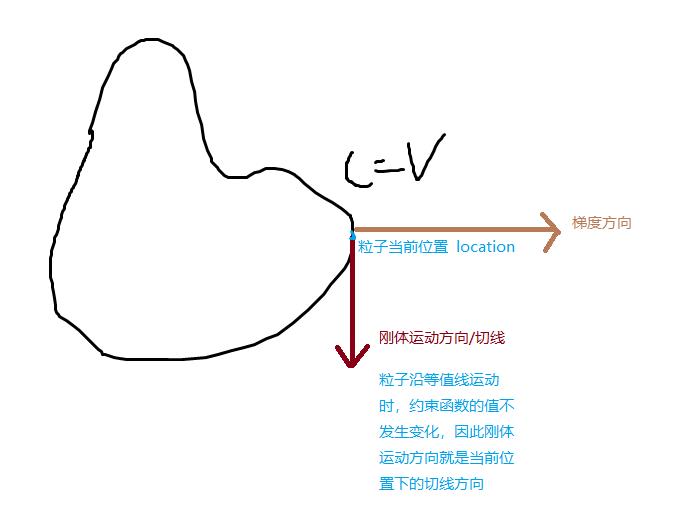
上面得到了重要结论——刚体运动方向与约束梯度方向垂直(刚体运动可以理解成系统运动),因此粒子运动在刚体运动方向上的投影是 0,对刚体运动没有任何影响,自然的,刚体(或者是整个系统)动量与角动量守恒。(系统不会整体发生运动)
这就是个人对论文中校正位移 沿约束梯度方向的理解。另外,动量守恒与角动量守恒还可以从平移不变性和旋转对称性上说明,这点后面再做讨论,现在继续说明约束求解过程。
求解各个粒子校正位移
论文给出的多元泰勒展开形式不正确,应该是梯度矩阵的转置
对某一个多元函数泰勒展开形式如下
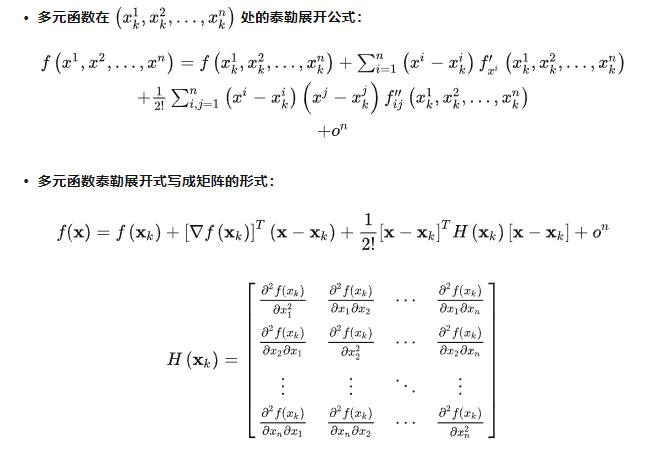
多个多元函数做泰勒展开
那么现在有
(1)
(2)
先求出 再代入(2)得到
后面推导过程没有什么好说的,直接看论文就好
考虑粒子质量就是用各个粒子质量占总质量百分比进行缩放,现在要说明的是如何求解约束梯度。
约束梯度求解
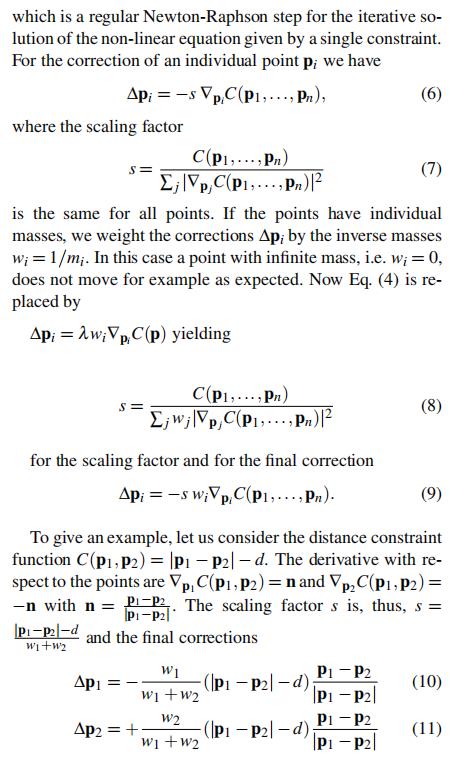
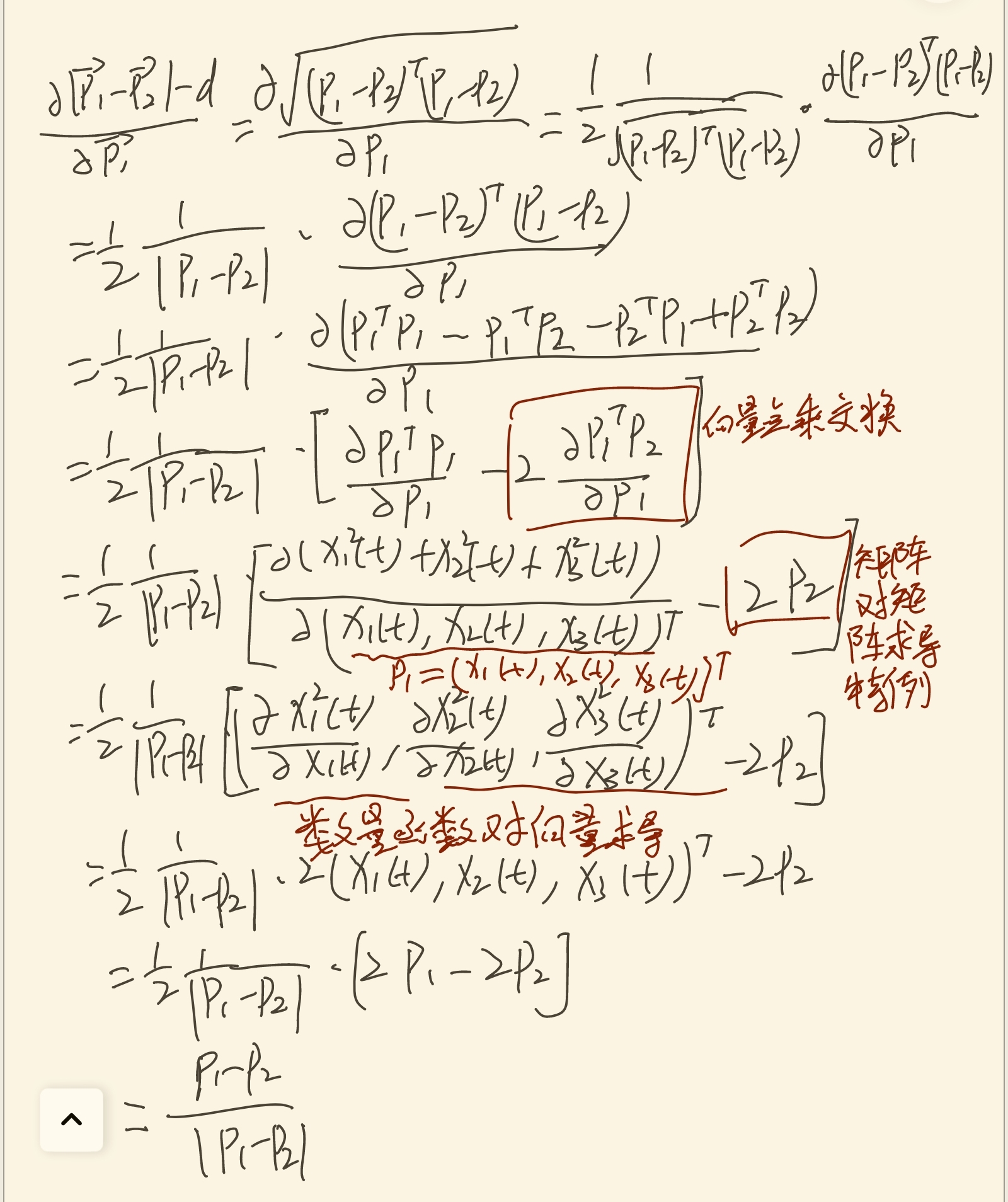
使用论文中的距离约束 距离说明。为了方便说明,首先给出数量函数对向量导数以及矩阵对矩阵的求导定义式。
数量函数对向量的导数
, ,有
矩阵对矩阵的导数
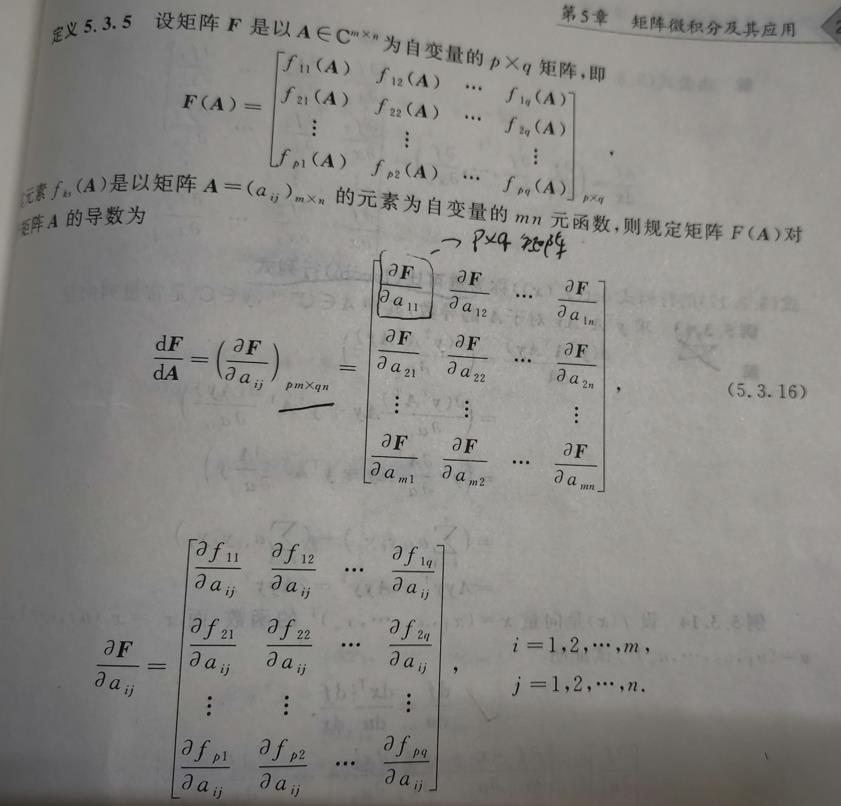
特殊的有

对距离约束求导有
至此,PBD 原理说明结束。
—————————————————————————————————————————————
PBD 额外补充
刚性程度
刚性程度就是粒子跟随刚体运动程度,假设刚体(或者说整个系统)在外力的影响下位移为 S, 那么粒子也发生位移 S, 则表明粒子完全跟随刚体运动,其 stiffness 为 1。
PBD 里最简单的将 stifness 作用到粒子上,就是将校正位移 直接乘以刚性系数 ,但考虑第 n 次迭代,某粒子的剩余误差将变为 ,刚性系数的作用不再是线性的,简单的将刚性系数修改为如下形式即可
经过 i 次迭代后误差变为
但这样刚性系数 k 直接和迭代次数相关了,也就是迭代次数影响粒子刚性程度,后续 EXPBD 对此做了改进。
碰撞响应
PBD 额外生成 个碰撞约束,然后与原本的 个粒子间约束一同进行约束求解,如过程 5~6,对应论文中的 8~11。PBD 在每个时间步长迭代中都会生成碰撞约束,并且碰撞约束数量与发生碰撞的粒子数量相关。
5 生成碰撞约束
6 再考虑系统内部粒子间的约束,求解约束对预测位置 p 校正

碰撞检测
如果射线从物体外 p 处发射进入物体内部,找到射线交点 以及 处的表面法线 , 则有不等式约束
如果射线在物体内,找到 最近的表面点 和 处表面法线 , 满足不等式约束
由于上述步骤是在约束求解循环外完成的,所以可能错过一些碰撞(应该是约束校正也可能发生碰撞吧)
碰撞约束案例
假定有三角面 ,现在希望粒子 不会穿过该三角面来到另一侧,则有不等式约束 (前面可带上正负号以确定三角面的哪一面)
其他约束
除去上面介绍的距离约束,简单的碰撞约束还存在大量其它的约束,比如弯曲约束,形状匹配约束,这点可以参考
深入浅出 Nvidia FleX】(1) Position Based Dynamics https://zhuanlan.zhihu.com/p/48737753
Games 103 Lecture 02 数学补充(部分) https://zhuanlan.zhihu.com/p/462442629 (给出了一些碰撞检测的方法)
————————————————————————————————————————————
参考
PBD 原论文
啥是PBD (Position Based Dynamics)
猴子都能看懂的position based dynamics笔记
【深入浅出 Nvidia FleX】(1) Position Based Dynamics
Games 103 Lecture 06 Intro to Physics-Based Animation Constraint Approaches
